The
Arm
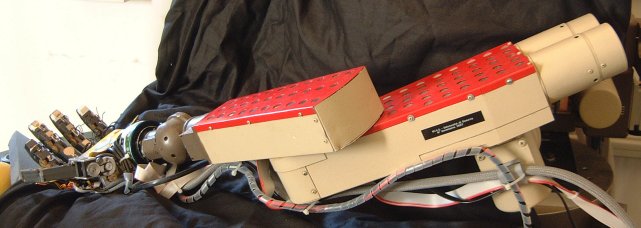
This is the oldest component of the Babybot. It is a Puma260 robotic arm. It is roughly the size of the human arm although it lacks one degree of freedom in the shoulder [this is why it looks weird]. We replaced completely the old digital controller with a standard interface towards a motor control card.
We implemented coordinated reaching of visually identified targets and investigated the implications of a low stiffness controller in interacting with the external world. Simple pushing of objects has been investigated also.
The controller is modeled after a biologically plausible motor control approach called "force field approach". In short, the compliance of muscles is taken into account as a way of simplifying the generation of plausible reaching trajectories.