
The Robot
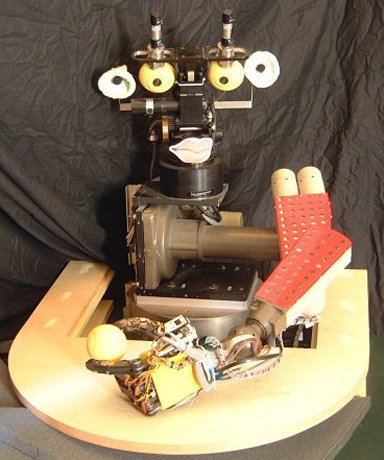
The Babybot is the LIRA-Lab humanoid robot. The latest version has eighteen degrees of freedom distributed along the head, arm, torso, and hand. The head and hand were custom designed at the lab. The arm is an off-the-shelf small PUMA manipulator and it is mounted on a rotating torso. The Babybot's sensory system is composed of a pair of cameras with space-variant resolution, two microphones each mounted inside an external ear, a set of three gyroscopes mimicking the human vestibular system, positional encoders at each joint, a torque/forse sensor at the wrist and tactile sensors at the fingertips and the palm.
The one you see in the picture above is the latest realization of the Babybot, a project started in 1996 at LIRA-Lab. The hardware itself went through many revisions so there's not much remaining of the mechanics of the first Babybot beside the PUMA arm.
Our scientific goal is that of uncovering the mechanisms of the functioning of the brain by building physical models of the neural control and cognitive structures. In our intendment physical model are embodied artificial systems that freely interact in a not too unconstrained environment. Also, our approach derives from studies of human sensorimotor and cognitive development with the aim of investigating if a developmental approach to building intelligent systems may offer new insight on aspects of human behavior and new tools for the implementation of complex, artificial systems.
Examples of the behaviors we implemented include (but not only) the control of eye movements such as vergence, saccades, and vestibulo-ocular reflex. We've been working on the integration of different sensory modalities as for example vestibular and visual cues, or acoustic perception with vision. We implemented reaching behavior as a means to physically interact with the external environment to discover about the properties of objects.






