The
Hand
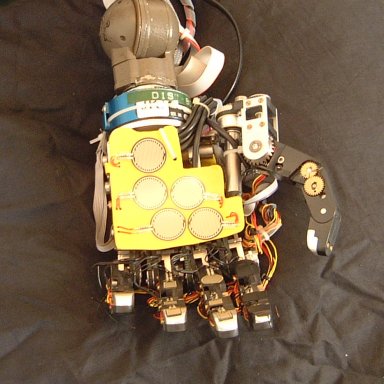
The object you see in this picture is the hand of the Babybot. This prototype has five fingers and six actively controlled degrees of freedom. Overall it has 15 joints. Some of them are coupled through elastic elements so that acting on only one motor would move many joints.
The hand has been fitted with tactile sensors (FSR) in the palm and fingertips. There are about 20 sensing elements. Sensorization is completed by a torque/force sensor mounted on the wrist.
Initial experimentation with the hand consisted in implementing a sort of "grasp reflex". Whenever you touch one of the tactile sensors the robot tries to close the fingers and form a grasp.